Visualisierung und Manipulation eines Distanz-Bereiches in der Mensch-Roboter-Interaktion mit Hilfe der Microsoft HoloLens
Wenn Menschen mit autonom agierenden Robotern zusammen arbeiten steht neben dem Aspekt der Sicherheit auch das individuelle Wohlbefinden der einzelnen Person im Vordergrund. Das in der Proxemik behandelte Verhalten, zeigt dass verschiedene Menschen ein unterschiedlichen Abstand zu anderen Individuen bevorzugen, bis zu welchem sie sich wohlfühlen.
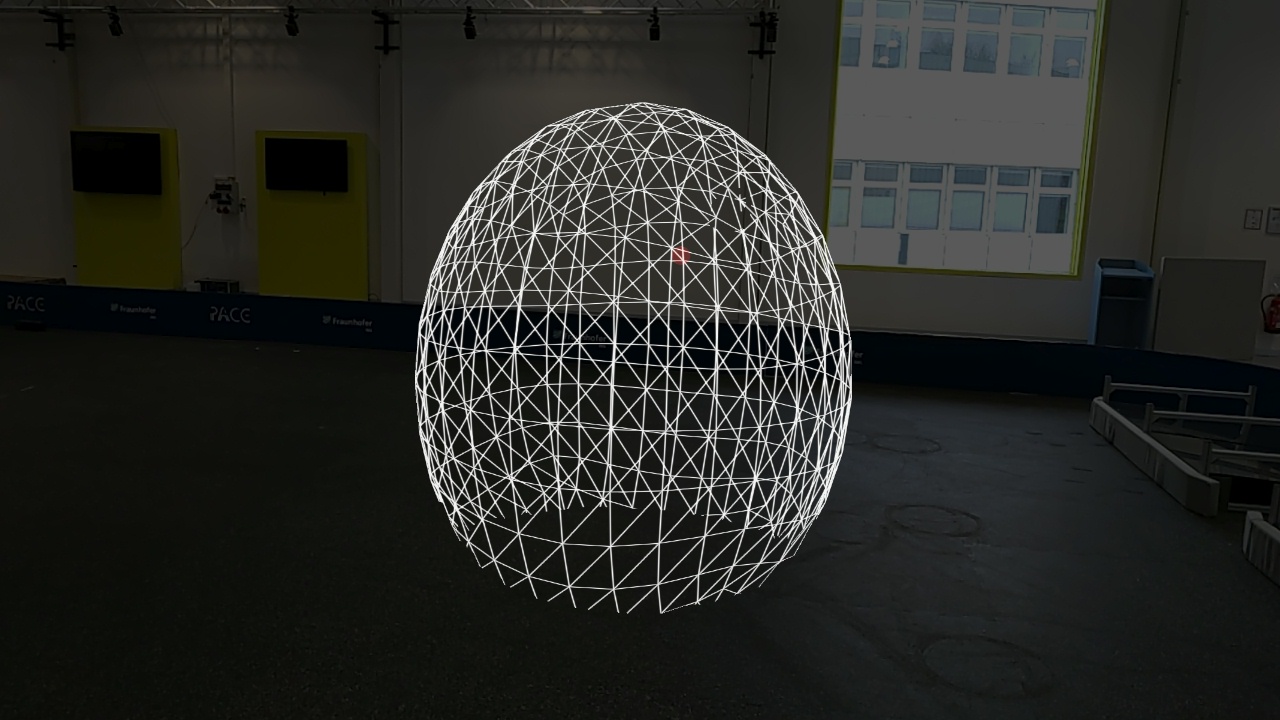
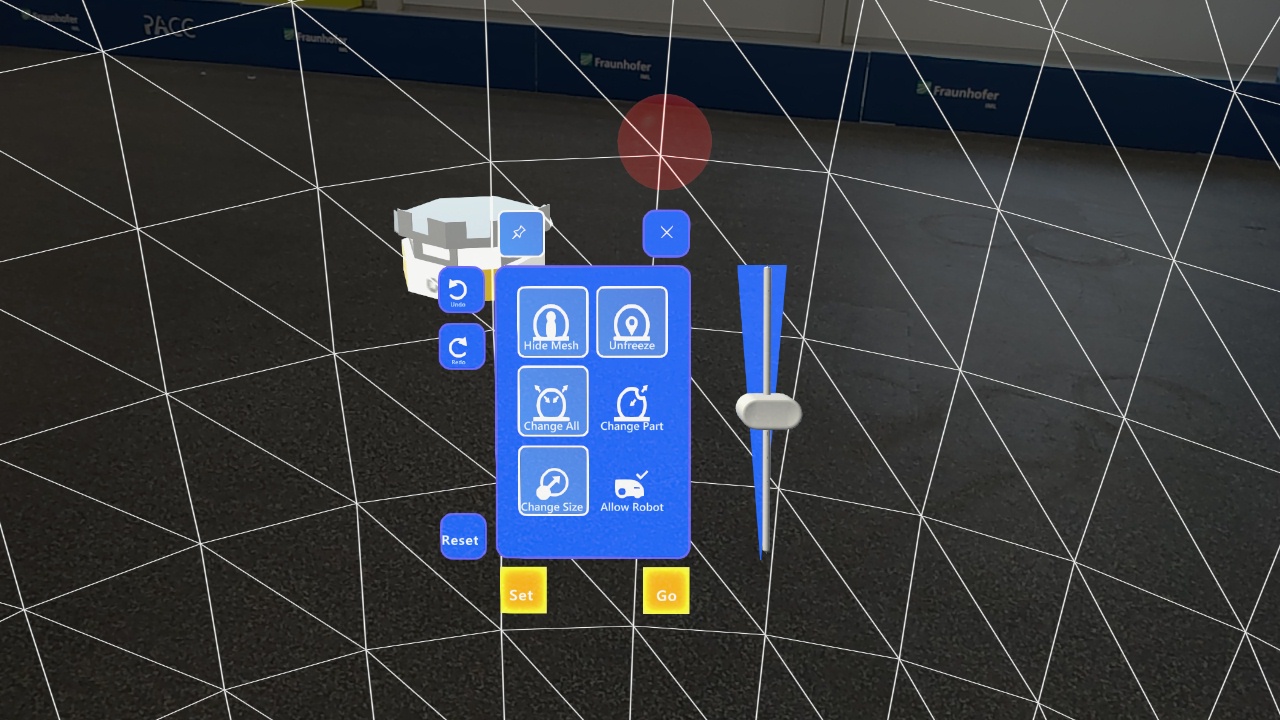
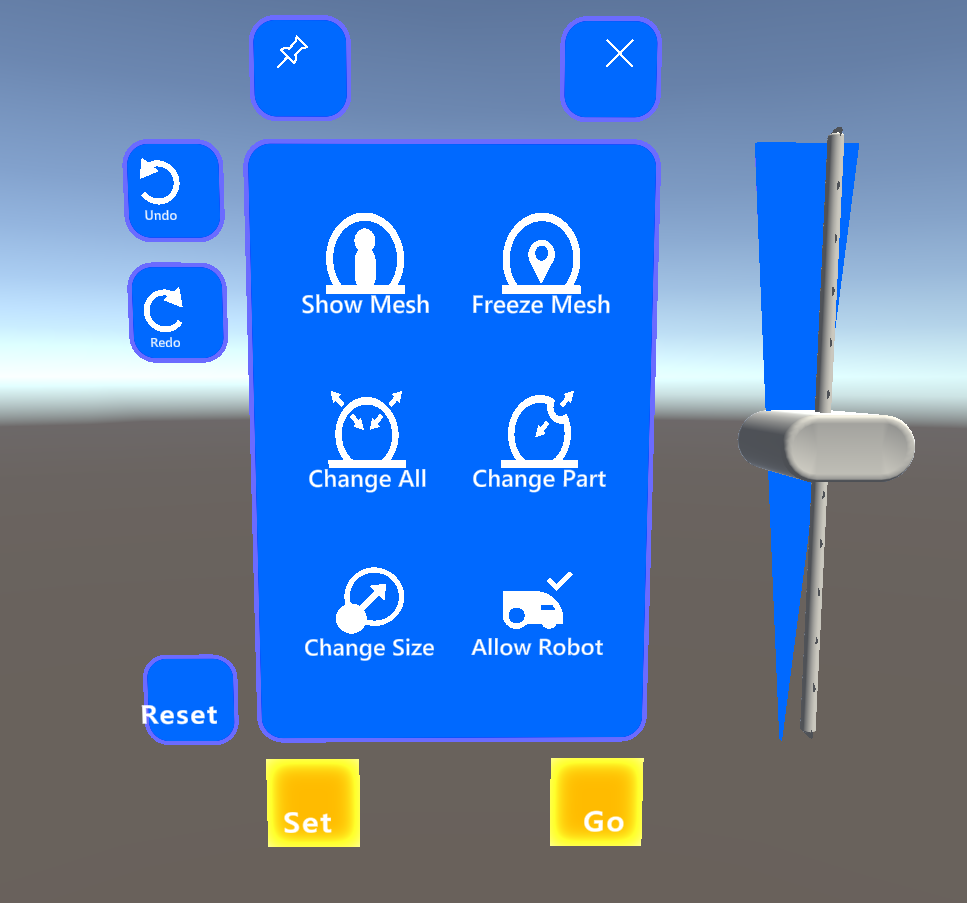
Um dieses dreidimensionalen Bereich nach eigenem Belieben gestalten zu können ermöglicht die HoloLens dem Nutzer seinen Bereich verschiedensartig zu skalieren oder auch punktuell zu verändern. Bei kleinen, schnell fahrenden Robotern kann gezielt der Bereich um die Beine vergrößert werden, bei einem Roboterarm der Bereich um den Oberkörper.
Sobald ein Roboter in den Bereich eindringt wird eine Warnung in das Sichtfeld des Nutzers eingeblendet und an einen Server die Nachricht übermittelt welcher Roboter in den Distanz-Bereich eingedrungen ist, damit dieser augenblicklich stoppen kann. Ausgewählten Robotern darf der Zutritt gewährt werden.
Damit auch andere Nutzer ohne eine HoloLens einen eigenen Distanz-Bereich haben, wird das Volumen an einen Server geschickt und auf alle Personen projiziert die von dem Kamerasystem getrackt werden können.
Meine Bachelorarbeit entstand in Zusammenarbeit mit dem Fraunhofer-Instituts IML in Dortmund.