Das vom Frauenhofer-Institut verwendete Vicon-Kamerasystem ermöglicht es die autonom agierenden Roboter in der Halle zu tracken und somit kürzeste Wege zu ermitteln.
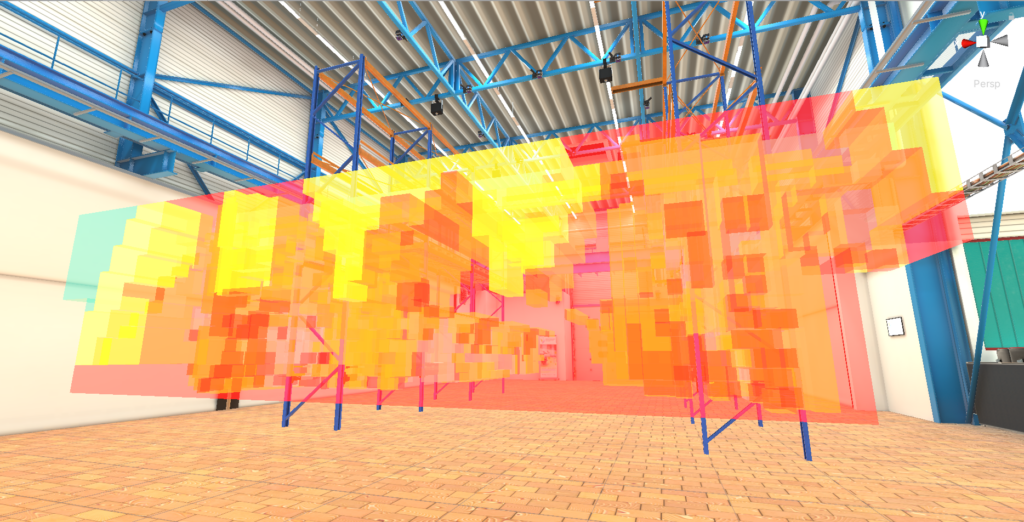
Im Zuge meiner Praxisphase bekam ich die Aufgabe eine Heatmap mittels einer Simulation in Unity zu erstellen. Durch die Heatmap kann ermittelt werden, welche Bereiche einer Zone gut von den Kameras erfasst werden oder ob es blinde Punkte gibt, an denen Roboter nicht getrackt oder schlecht getrackt werden können. Die von Vicon zur Verfügung gestellte Anwendung für eine Heatmap ist jedoch nicht individualisierbar.
In der von mir erstellten Simulation können Hindernisse aufgestellt werden sowie die Kameras umpositioniert werden, um verschiedene Szenarien zu testen. Anschließend können die Vicon-Kameras in der Realität korrekt angebracht werden.
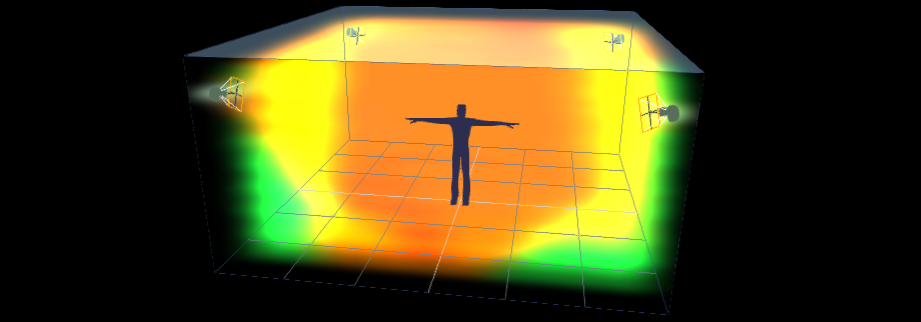
Wenn ein Punkt im Sichtbereich mehrerer Kameras liegt wird er rot markiert. Je schlechter das Tracking an einem Punkt ist, umso bläulicher färbt sich dieser ein. Die Kameras visualisieren über ein Frustum direkt die Grenzen ihres Sichtfeldes.
In der Simulation kann ein autonom fahrender Roboter agieren, während gleichzeitig angezeigt wird von welchen Kameras er gesehen wird.